





























Opis projektu:
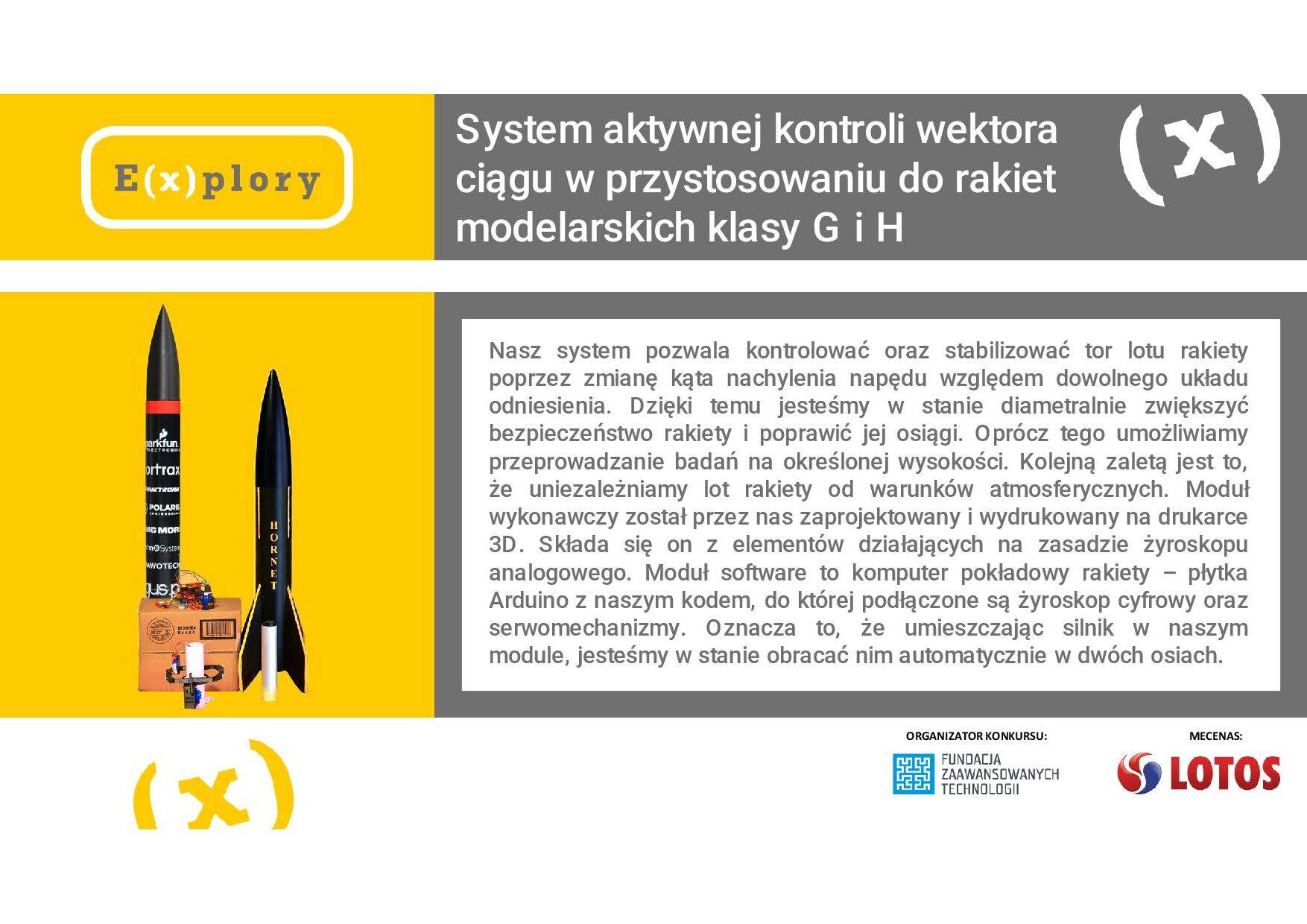
Nasz projekt opiera się na tym, że zmieniamy kąt nachylenia napędu rakiety względem dowolnego układu odniesienia. Dzięki temu jesteśmy w stanie diametralnie zwiększyć bezpieczeństwo rakiety i poprawić jej osiągi. Dzięki temu mamy możliwość przeprowadzenia badań na określonej wysokości oraz tym samym
uniezależniamy lot rakiety od warunków atmosferycznych. Moduł wykonawczy został przez nas wydrukowany
na drukarce 3D.Składa się on z elementów działających na zasadzie żyroskopu analogowego. Moduł
software to nasz kod wgrany na Arduino z podłączonym do niego z żyroskopem cyfrowym i
serwomechanizmami. Oznacza to, że silnikiem włożonym w moduł jesteśmy w stanie poruszać w dwóch
osiach. Jesteśmy na etapie testowania silników na autorskiej hamowni. Analizujemy wyniki i optymalizujemy konstrukcję.

DARIUSZ WRÓBLEWSKI, JAKUB WRÓBLEWSKI
Tytuł projektu:
Opracowanie systemu aktywnej kontroli wektora ciągu silników rakietowych klasy G i H, podczas ich startu i lotu
Opiekun naukowy:
Kazimierz Okraszewski
Szkoła:
Technikum Mechatroniczne nr 1 w Warszawie, Zespół Szkół Licealnych i Technicznych nr 1 w Warszawie